


筆跡診断で右下がりの文字を書く人の性格とは?有吉さんは右下がり型
筆跡診断で右下がりの文字を書く人の性格をまとめました。
目次
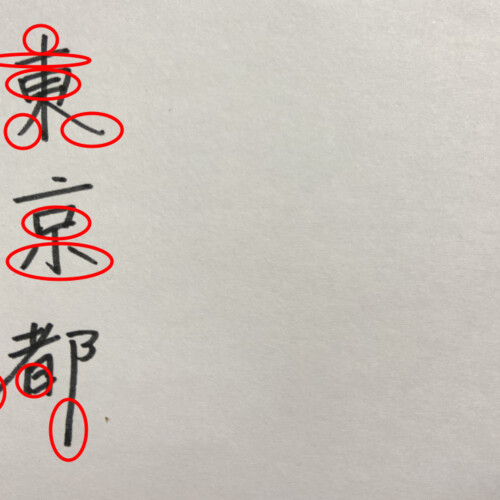
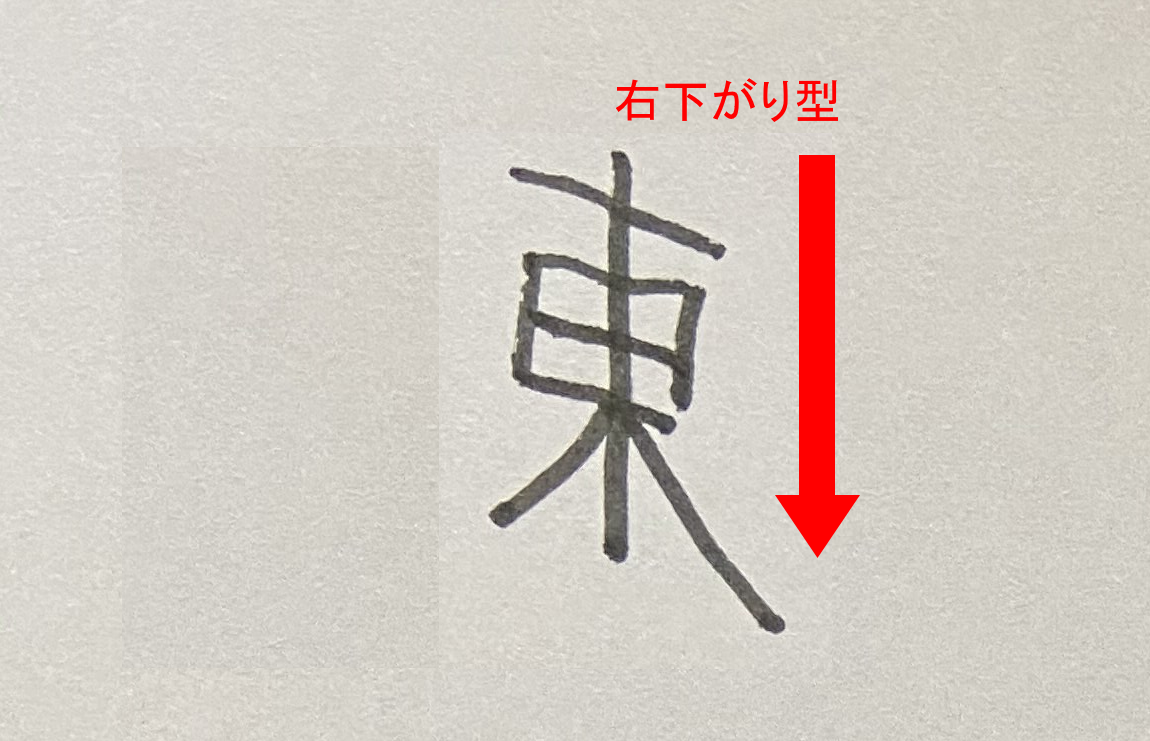
右下がりの文字を「右下がり型」といいます
右下がりの文字を「右下がり型」といいます。
この型を書く人は言われた通りのことをしない。
多数派の意見に左右されない独自の考え方をもちます。
冷静で、物事を斜めから見る傾向があり、体制派が気づかないことを批判・批評します。

東京にあるおすすめの人気占い店をランキングでご紹介します。当たると人気な占い店は、何年にも渡り継続し東京各地に店舗を出店しています。
右下がり型の有名人
典型的な右下がり型の有名人は有吉弘行さんです。
診断結果そのまんまといった感じですね。

こんにちは。
筆跡診断士のぺなんなおじさんです。
今回は有吉弘行さんを筆跡診断して性格を丸裸にします。有吉弘行さんの筆跡診断の結果有吉弘行さんの性格は
整理整頓ができるキレイ好きタイプ。
真面目、生真面目でそれが裏目に出て融通が利きにくい部分があるでしょう。
人の下で働くことが...
横書きの診断には注意が必要
右上がり型を含め上記診断は縦書きの場合です。
横書きだけの資料での診断は注意が必要です。